Motion Control Remote Head for Jib Crane
by John Pilgrim
December 8, 2011
It's been a while, as I got sidetracked with a doorway dolly design employing dual Ackerman-Jeantaud steering and then my daughter Grace was born this summer.
The remote head design has received some significant improvements.
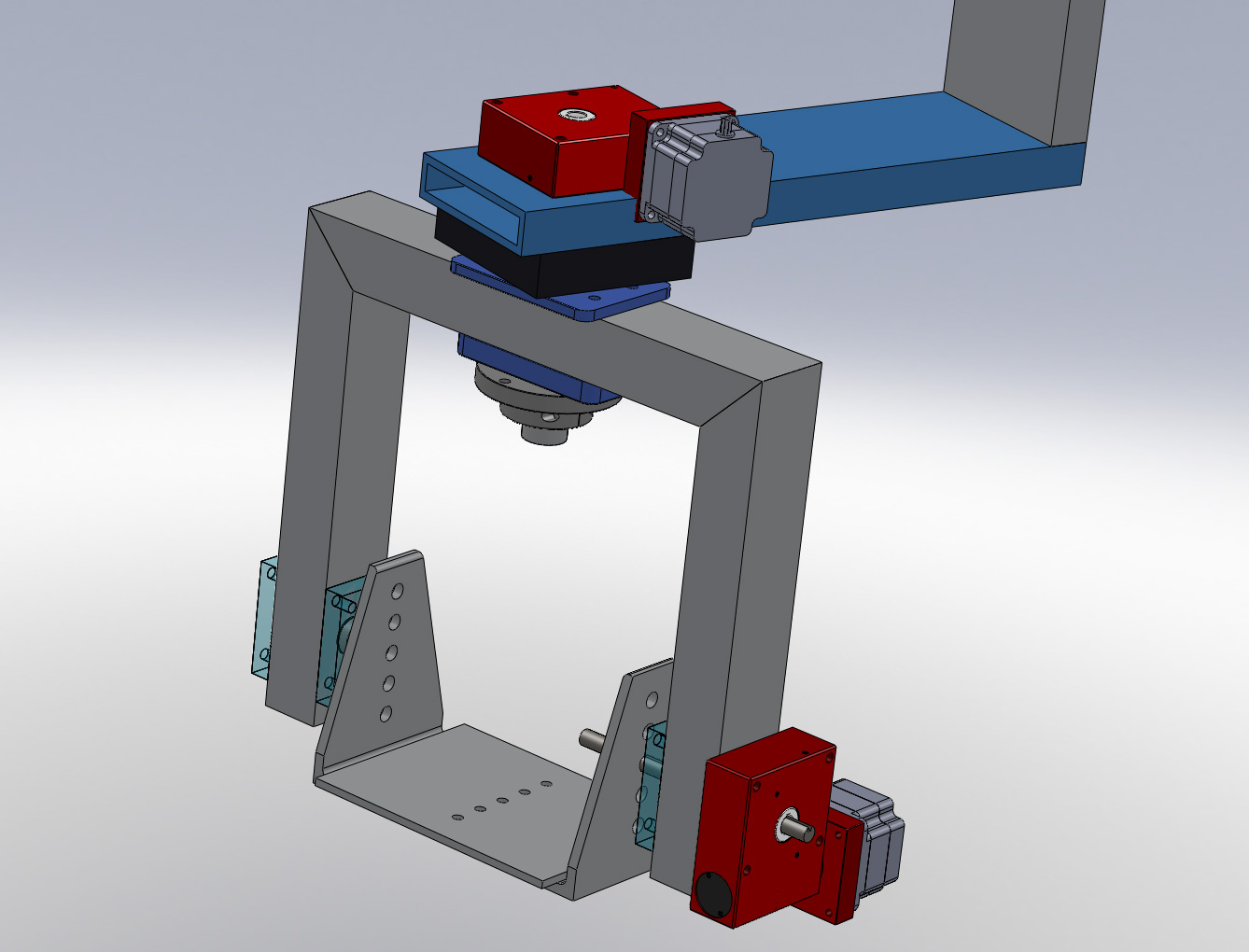
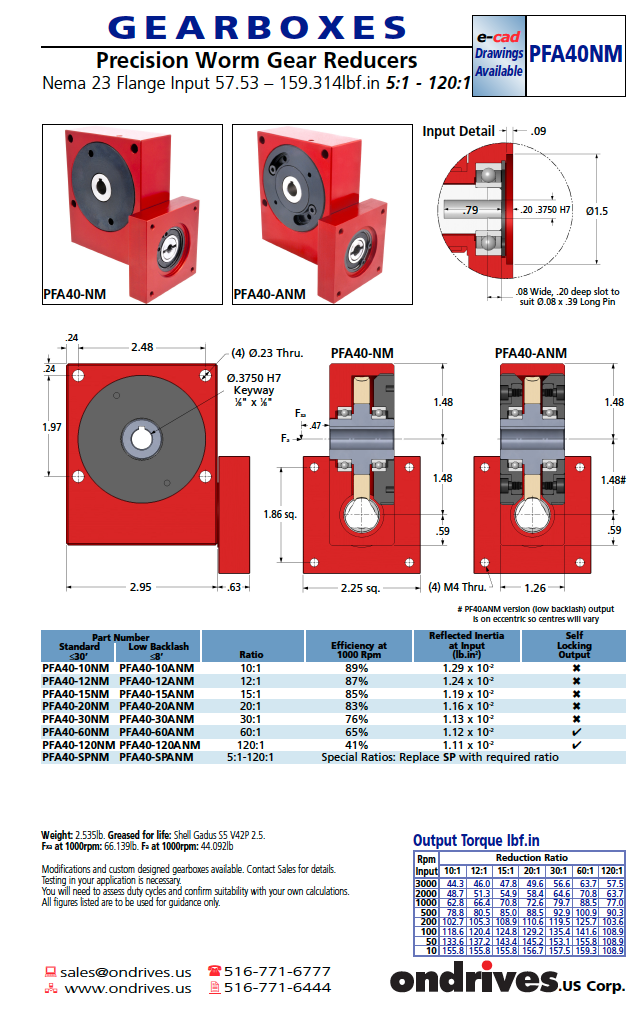
I replaced the previous iteration's hand-made worm gear assemblies with precision worm gearboxes from OnDrives, shown red in the above drawing. I have a pair of PFA40-120NM gearboxes on order but they aren't due to arrive until mid-January.
I also changed the gear ratio to 120:1 for both pan and tilt, and opted for the standard 30' backlash version rather than the considerably more expensive reduced 8' backlash version. If either the gear ratio or the backlash isn't optimal, I'll order revised parts and swap them in.
Next, I revised the design of the axle and bearing system for the pan axis and machined a working prototype:
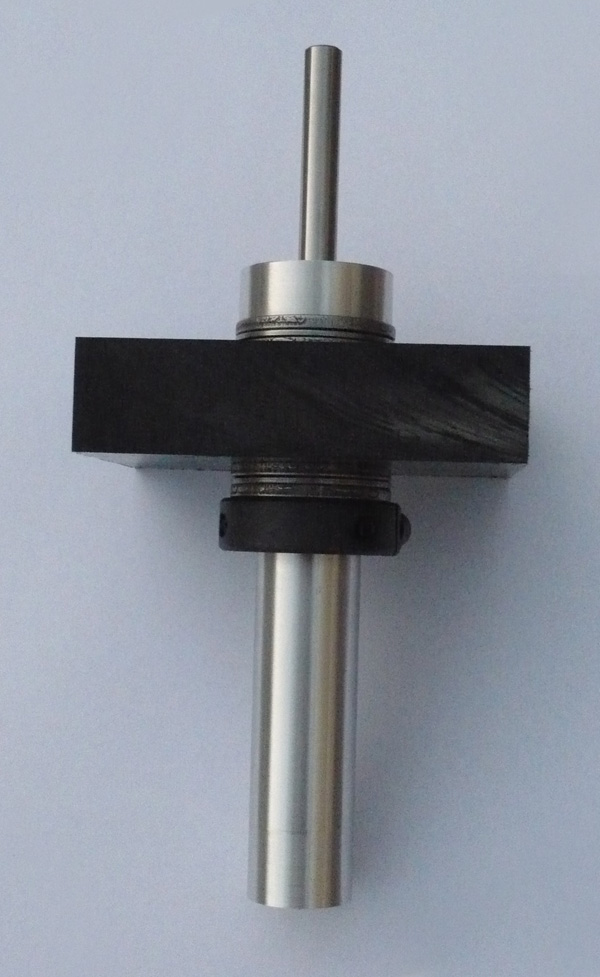
The 3/8" shaft on top mates with the gearbox output and
the 1" lower shaft will connect to the lower "U" frame via
a shaft
collar.
The main vertical thrust load is taken by the two roller
thrust bearings (visible in the picture above on top and bottom of the black Delrin
block) and the smaller axial load is taken by the face of the bore through the Delrin block.
{kind=link}
{kind=link}
Lastly, designed the base and pivot for the jib arm, for either static use or for use on standard 24.5" dolly track:
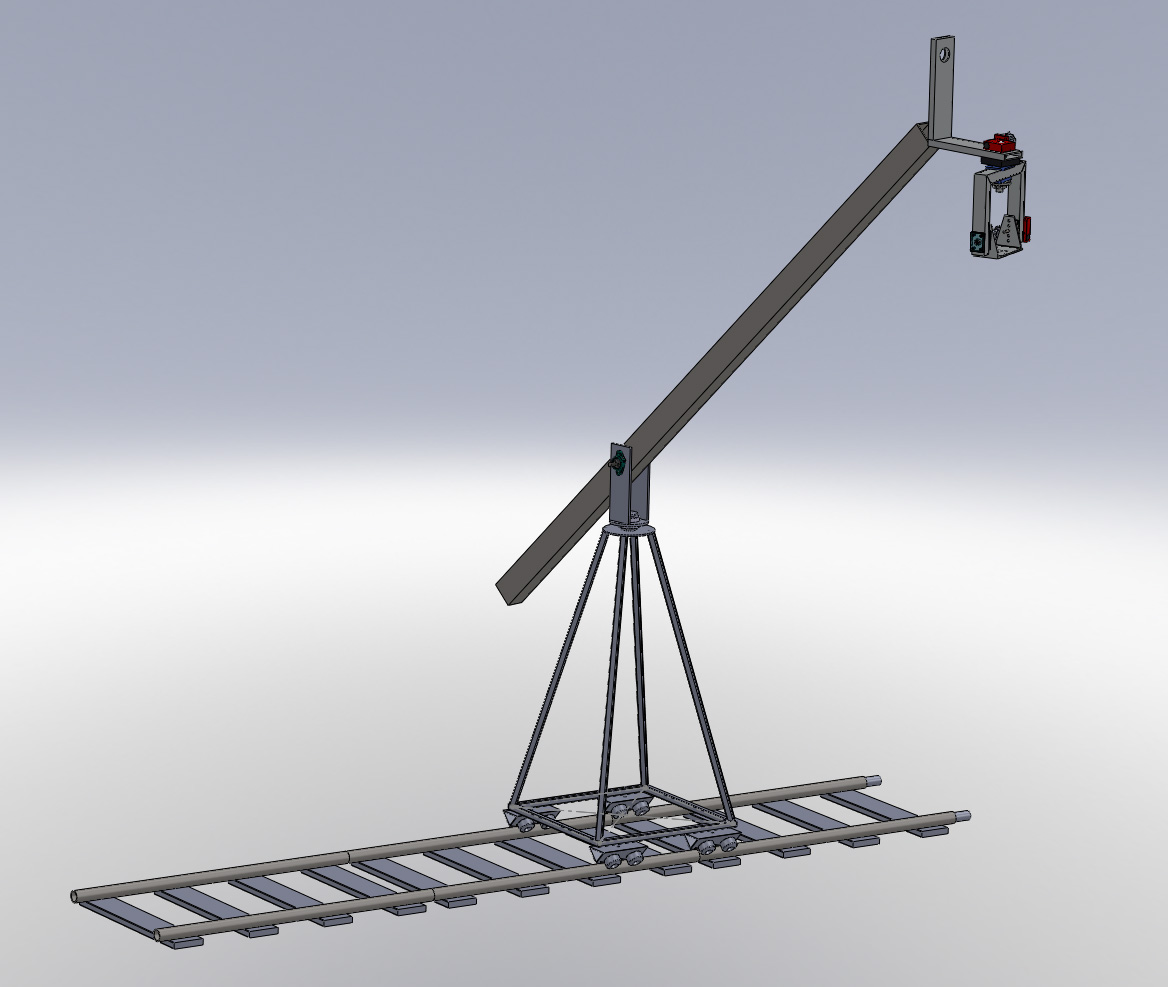
Obviously the jib arm design isn't complete in the drawing above, but I've thought through and picked out the requisite hardware (clevis rod ends, flange mounted bearings, etc) at McMaster-Carr.
{kind=link}
{kind=link}
In response to a question on the openmoco.org forums, here are some detail images of the pan axle (green in the CAD rendering) and how it connects the gearbox to the lower frame:
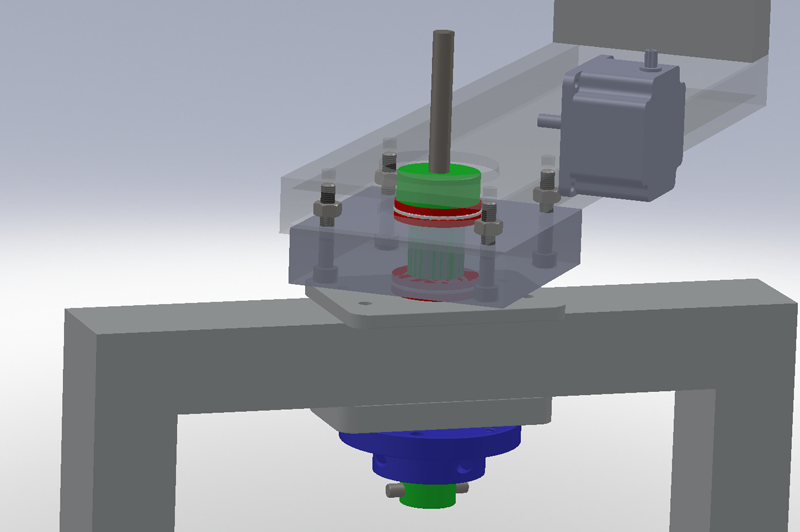
The gearbox (hidden above) bolts to the top of 1"x4"x16" aluminum
rectangular tube (light grey transparent).
The 1"x4"x4" Delrin block (dark grey transparent) bolts to the
bottom of 1"x4"x16" aluminum
rectangular tube.
The
pan axle (green) sits on a thrust bearing (red) on
the delrin block.
A 3/8" keyed rod connects the pan axle to the gearbox output.
A flange collar (blue) connects the pan axle to the lower frame.
A
1/4"
dowel rod provides insurance that the lower frame cannot slide off
the pan axle should the collar ever loosen.

Here is a 3D PDF on the current remote head
design: MoCoHead_2011Dec14.PDF
(Requires
Acrobat Reader. Mac OS X Preview.app will not render the 3D content.)